Mathematical calculations and algorithms for controlling the locomotion of the Spot Micro robot dog. This work forms the foundation of the robot's movement system, enabling smooth and stable walking gaits.
Mathematical Concepts
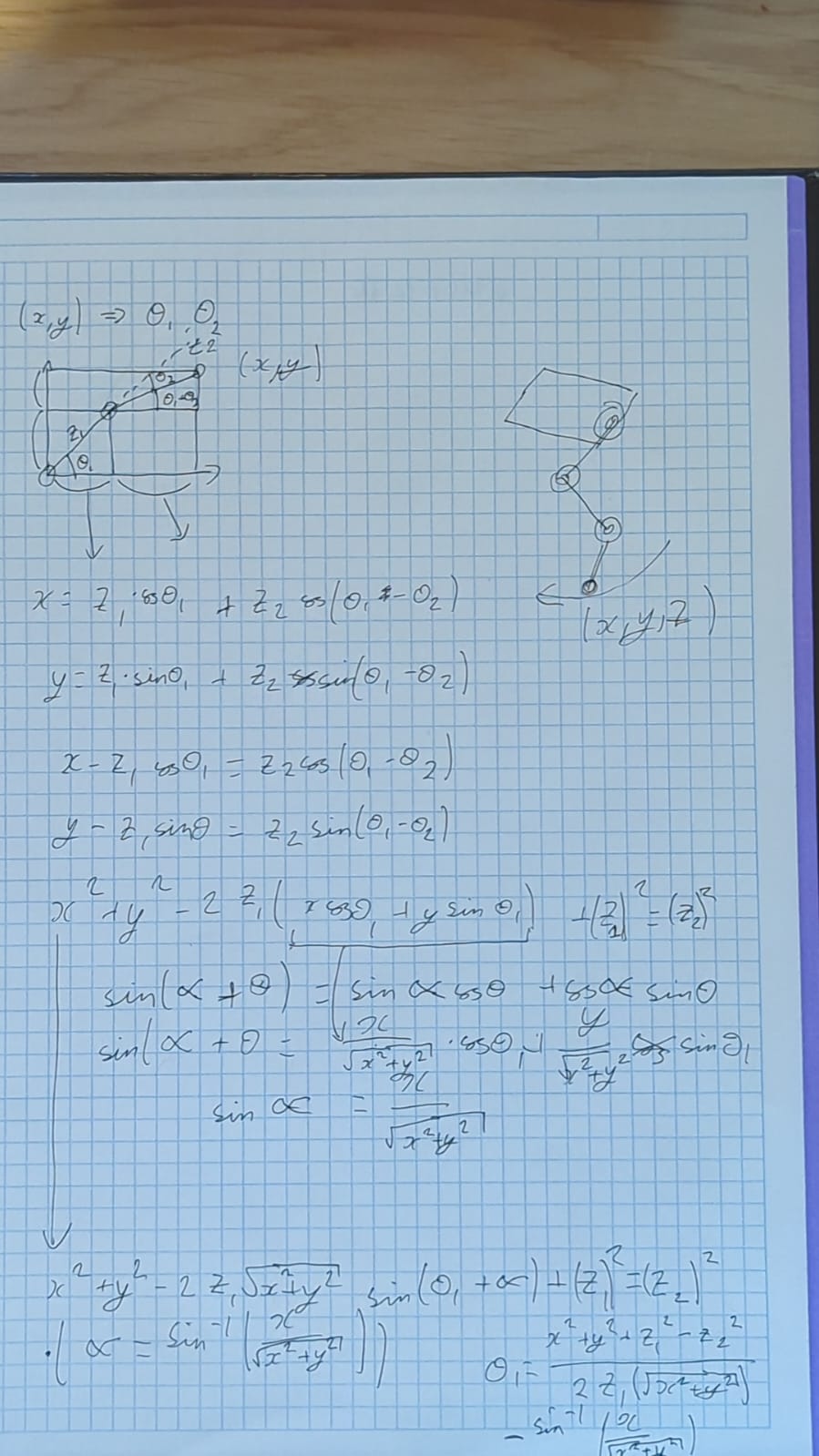
- • Forward Kinematics - Joint angles to end effector position
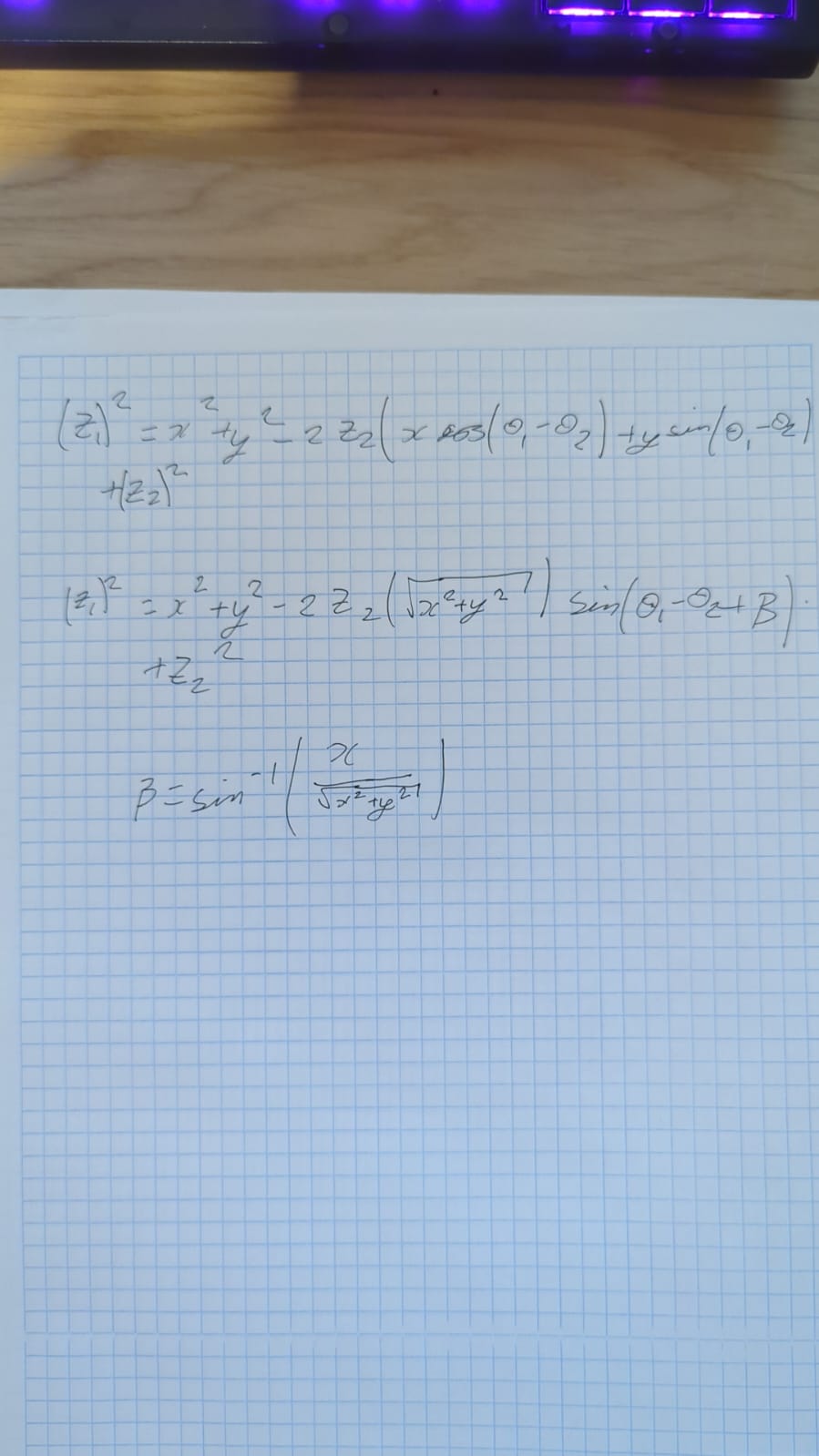
- • Inverse Kinematics - Desired position to joint angles
- • Jacobian matrices for velocity control
- • Trajectory planning algorithms
- MethodMathematical derivation and implementation
- ApplicationQuadruped robot locomotion control
- ResourcesOrganic Chemistry Tutor - Kinematics
- PhysicsWalter Lewin Physics Lectures
Technical Details
The kinematics calculations involve transforming between the robot's base frame and each foot's position in 3D space. For a quadruped, each leg has 3 degrees of freedom (hip, upper leg, lower leg), requiring careful geometric analysis to compute the inverse kinematics.
Implementation Approach
- Geometric Method: Used trigonometric relationships to derive closed-form solutions for the 3-DOF leg
- Workspace Analysis: Determined the reachable workspace for each leg configuration
- Gait Generation: Created smooth trajectories for trot, walk, and creep gaits
These calculations are available for anyone working on similar robotics projects. The mathematical foundations are universal and can be adapted to different robot configurations.